
توضیحات
اگر می خواهید با تعدادی از قابلیت های متلب و سیمولینک در شبیه سازی و تحلیل و طراحی کنترل کننده ها آشنا شوید ما این محصول را به شما پیشنهاد می دهیم.
برای هر دو بخش یک فایل گزارش وجود دارد که تمامی مراحل طراحی را تشریح می کند.
بخش 1 :
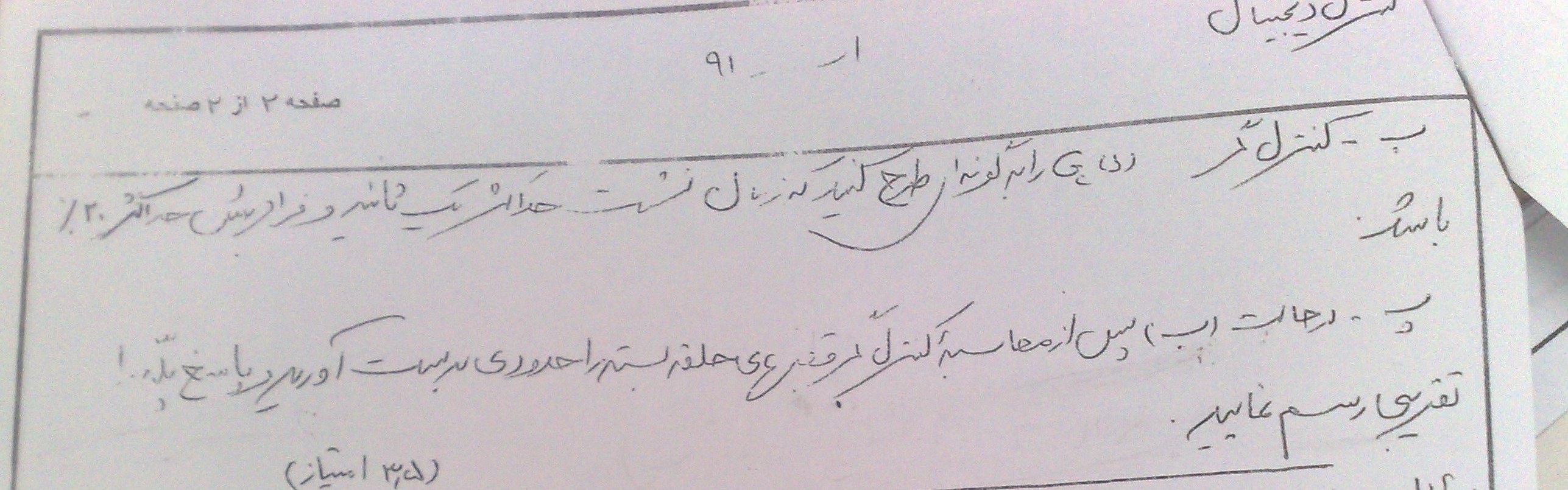
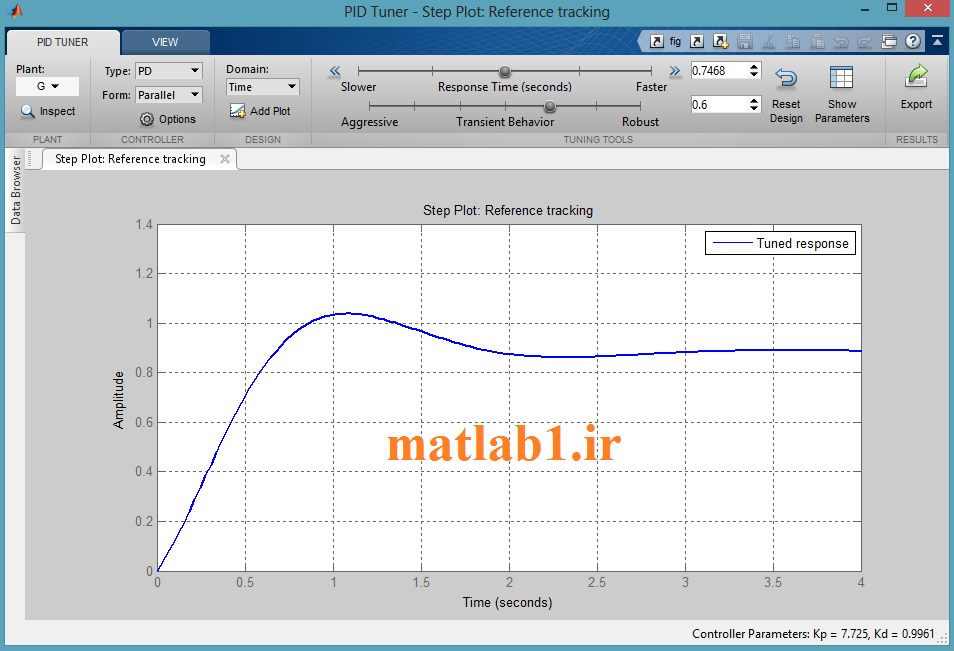
در این محصول ما برای شما طریقه طراحی یک کنترل کننده برای داشتن زمان نشست و فراجهش مطلوب را خواهیم دید.
در این مثال ما می خواهیم حداکثر زمان نشست یک ثانیه و فراجهش حداکثر 20 درصد باشد.
این فایل شامل یک مدل سیمولینک هم می باشد.
یک فایل گزارش هم قرار دادیم که طریقه طراحی دستی را تشریح می کند.
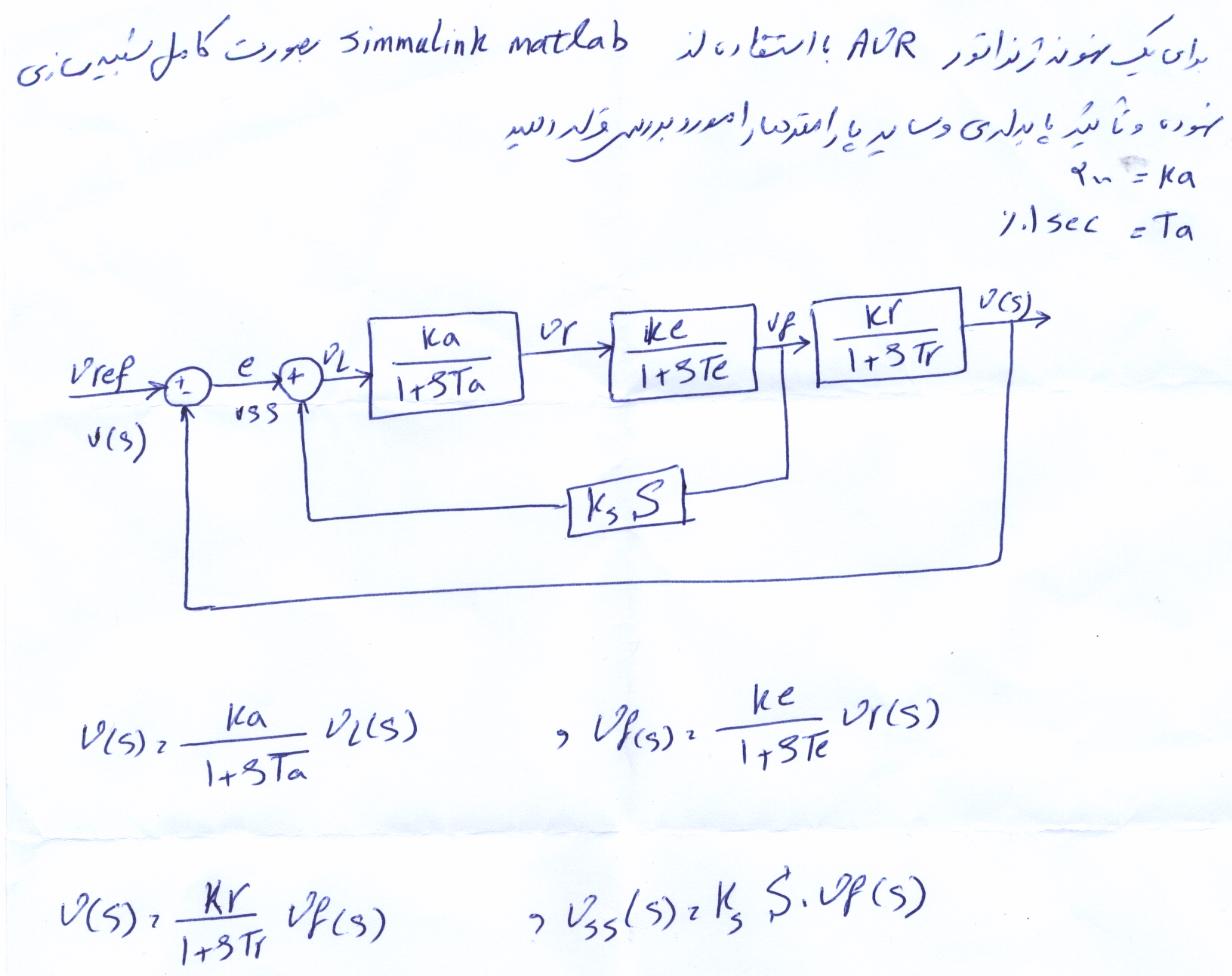
بخش 2 :
پروژه درس کنترل توان راکتیو
در این کار هدف طراحی جبران ساز برای سیستم کنترلی زیر می باشد.
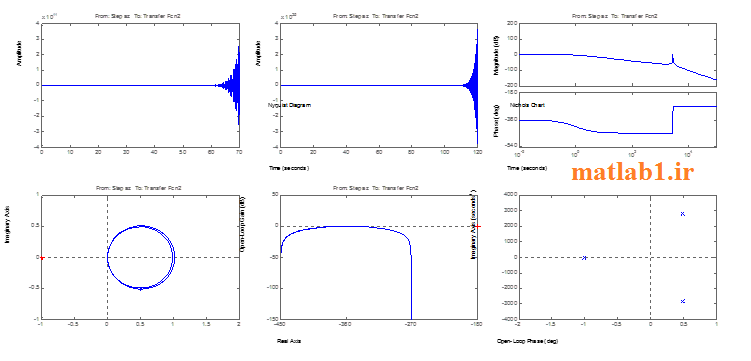
تعدادی از تصاویر :


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.