
توضیحات
به طور کلی می توان عمل ردیابی اشیا متحرک توسط دوربین را به عنوان تطابق اشیای تشخیص داده شده به وسیله مجموعه ای از نقاط فرموله بندی نمود. تطابق نقاط و تطابق شی به نحوه نمایش تصاویر توسط تعدادی از نقاط کلیدی پراکنده بستگی دارد. به طور کلی روش تطابق نقطه را می توان به دو طبقه اصلی به نام روش های قطعی[1] و روش های تصادفی[2] تقسیم بندی نمود.

روش های قطعی با به کارگیری یک روش جستجوی تکراری برای یافتن ماکزیمم محلی تابع هزینه شباهت بین تصویر الگو و تصویر جاری به شدت مورد استفاده قرار می گیرد. معیارهای اندازه گیری بهتر و بهینه تری همچون الگوریتم انتقال میانگین و الگوریتم ردیابی مبتنی بر مدل[3] به عنوان تابع هزینه مورد استفاده قرار می گیرد. روش های قطعی از روش های اکتشافی حرکت کیفی به منظور محدود کردن مشکل تطابق استفاده می کنند و شی ردیابی شده را در هر فریم به وسیله جستجوی تکراری برای یک ناحیه که بیشترین شباهت بین این ناحیه و پنجره شی وجود دارد را نمایش می دهد. این روش ها از نظر محاسباتی کارا هستند و به در هم ریختگی پس زمینه، نویز ، انسداد و حرکت سریع اشیا حساس هستند. از طریف دیگر روش های تصادفی به طور واضح و صریح اندازه گیری شی را انجام می دهند و از فضای حالت به منظور مدلسازی حرکات سیستم های ردیابی استفاده می نمایند. در مدل گوسین و خطی از فیلتر کالمن استفاده می شود که فیلتر کالمن میانگین و کوواریانس توزیعات را منتشر کرده و به روزرسانی می نمایند. برای مسائل غیر خطی و غیرگوسین این امکان وجود ندارد که توزیع ها را به صورت تحلیلی مورد ارزیابی قرار داد به همین دلیل الگوریتم های متعددی برای تخمین این توزیع ها به وجود آمده است. از جمله این الگوریتم ها و روش ها فیلتر ذره یا روش مونت کارلو ترتیبی است.
روش فیلتر ذره یک روش عددی است که اجازه می دهد یک راه حل تقریبی جهت تخمین پی در پی پیدا شود و برای مسائل غیرگوسین و غیرخطی می تواند بسیار موفق باشد. ایده اولیه فیلتر ذره در سال 1949 توسط آقای متروپلیس مطرح شد که بررسی جزییات مجموعه ای از ذره ها را به جای یک ذره را مورد مطالعه قرار داد[4]. اما در سال 1945 یکی از اولین ایده های اصلی تر و پایه و اساس فیلتر ذره با محاسبه و بکارگیری الگوریتم مونت کارلو توسط آقایان همرسلی و مورتون ارائه گردید. فیلتر ذره یک مبحث کاملا آماری می باشد و دلیل مطرح شدن آن این است که بتواند برای مسائلی به کار گرفته شود که تخمین آنها توسط فیلتر کالمن مشکل باشد.
[1] Deterministic method
[2] Scholastic method
[3] Model based tracking
[4] Metropolis, Nicholas, and Stanislaw Ulam. “The monte carlo method.” Journal of the American statistical association 44.247 (1949): 335-341.
در چند قسمت اول این فیلم آموزشی تئوری فیلتر ذره توضیح داده می شود. اسلایدهای استفاده شده در این آموزش از سیمنار پیاده سازی الگوریتم های مختلف توسط شرکت mathworks در ژاپن استخراج شده اند.
قسمت های پایانی اختصاص به برنامه نویسی متلب فیلتر ذره دارد و چندین مثال از ردیابی شی در ویدئو آورده می شود.
سرفصل مطالب :
حلقه بزرگ در پیاده سازی الگوریتم
فیلتر ذره چیست ؟
چگونه یک شی را در ویدئو ردیابی کنم ؟
چگونه کد فیلتر ذره particle filter را در متلب پیاده سازی کنیم ؟
چرا از معادلات دیفرانسیل برای پیش بینی مکان بعدی شی استفاده نکنیم و از فیلتر ذره استفاده می کنیم ؟
مدل فضای حالت فیلتر ذره
مدل سیستم system
مدل مشاهده observation
هدف از فیلتر ذره چیست؟
تعداد ذرات فیلتر کم یا زیاد خوب است ؟
الگوریتم فیلتر ذره
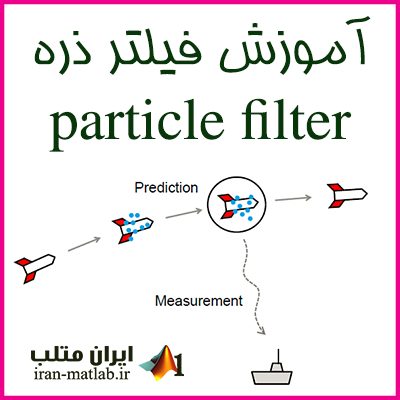
پیش بینی prediction
فیلتر filtering
میعار انتخاب ذرات چیست؟
شباهت فیلتر ذره و الگوریتم بهینه سازی تجمعی ذرات PSO
معرفی سمبل های مورد استفاده در تئوری فیلتر ذره
میعار likelihood
نحوه تغییر شش ذره در فیلتر ذره به صورت نموداری
رابطه محاسبه موقعیت و سرعت جدید ذرات
فرق بین متغییر state و متغییر observable
برنامه نویسی متلب فیلتر ذره
توضیح خط به خط کد
معرفی پارامترهای خروجی دستور خواندن ویدئو
فرمول update ذرات
تاثیر فاصله دوربین
تاثیر محو شدن هدف در تصویر
تاثیر تعداد ذرات در نتیجه فیلتر ذره
تاثیر انحراف معیار موقعیت و سرعت
پیش نمایش 1 :
لینک دانلود پیش نمایش 1 (کیفیت اصلی)
پیش نمایش 2 :
لینک دانلود پیش نمایش 2 (کیفیت اصلی)
حسام –
خیلی خوب و عالی بود
دستتون درد نکنه
آیهان –
با سلام
ببخشید این فیلتر برای ترکینگ با دوربین متحرک بکار میره؟
ایران متلب –
با سلام و احترام
فیلتر ذره یکی از موضوعات داغ این روزه مراکز تحیقاتی دانشگاه های دنیا می باشد و کاربردهای بسیار زیادی دارد که در قسمتی از فیلم آموزشی در مورد کاربردهای آن صحبت می شود. که یکی از آن ترکینگ با دوربین متحرک می باشد.
هومن –
سلام
این آموزش برای من خیلی مفید بود
ali –
سلام من این محصول را خریداری کردم و بسیار مفید بود
sahar –
سپاس فروان از پکیج های خوبتون.
من باید یک جسم متحرک رو در ویدِیو با فیلتر ذره ردیابی کنم. فیلم فیلتر ذره و تشخیص جسم رو دیدم. سوالی .که دارم اینه که چطوری یک جسم رو در ویدیو تشخیص بدم بعد به ورودی فیلتر ذره اعمال کنم.
ممنون میشم راهنمایی کنین. یا این که ویدیویی در این مورد در سایت قرار دهید که تهیه کنیم.
ممنون
ایران متلب –
با سلام و احترام
جهت ردیابی جسم متحرک در ویدئو دو روش وجود دارد. لینک آموزش های فارسی هر دو را در زیر می توانید بینید :
فیلتر ذره particle filter
شار نوری optical flow
توجه فرمایید برای تشخیص یک جسم در تصویر روشهای زیادی وجود دارد که متناسب با پارامترهای جسم متفاوت است. همانطور که در فیلم مثالهایی زده شد برای دنبال کردن یک جسم مثلا قرمز رنگ ، شما می بایست تابع هزینه را بر اساس مقدار پیکسل جسم در تصویر بنویسید. که در فیلم آموزشی کامل توضیح داده شد. گاهی شما می خواهید بر اساس ویژگیهای جسم در تصویر ، فیلتر ذره آنرا دنبال کند. در این حالت تابع هزینه در فیلتر ذره را بر اساس مثلا مساحت جسم می نویسید. همه چیز بر می گردد به تابع هزینه در فیلتر ذره.
leila –
با سلام
من هم فیلتر ذره و شار نوری را خریداری کردم ولی لینک دانلود ارسال نشده است. چقدر طول خواهدکشید برای ارسال لینک؟
حسن اصغري –
با سلام و احترام
بابت این تاخیر از شما معذرت خواهی می کنیم.
سحر –
سلام.این پکیج درکل چند ساعت است؟
حسن اصغري –
با سلام
حدود 3 ساعت
نیما –
سلام و خسته نباشید.
ببخشید من از این تئوری میخوام تو تخمین مدل هیدرولوژیکی استفاده کنم میخواستم بپرسم تو این ویدیو اساس این روش هم توضیح داده میشه ؟
واینکه آیا ممکنه شما بخشی از ویدیو رو به عنوان نمونه آپلود کنید تا از چیزی که قرار هست تهیه کنیم مطمئن شیم ؟
ایران متلب –
سلام
کاربرد فیلتر ذره در تخمین مدل هیدرولوژی را دانشش را ندارم. در مورد قسمت دوم سوالتون ما دو نمونه فیلم در همین صفحه گذاشتیم که شما می تونید دانلود و نگاه کنید تا از کیفیت تصویر و صدا مطمئن بشید.
ملودی –
سلام ببخشید این فایل اموزشی برای کاربرد فیلتر ذره ای در مخابرات مفیده؟
ساسان –
سلام خسته نباشید من میخوام توی فیلمم یه دایره ی کوچک به صورت برچسب رو جسمم رو دنبال کرده و سرعت اون رو بدست بیارم یعنی روی یه ماشین اسباب بازی برچسب قرمز زدم و میخوام فقط اون برچسب رو شناسایی کرده وسرعت اون رو بدست بیارم از کدوم فیلم اموزشی تون استفاده کنم بهتره؟؟؟؟؟
ایران متلب –
سلام
در همین فیلم آموزشی ما مثالی داریم که شخصی که لباس قرمز پوشیده است را دنبال می کند.
قهرمان –
خوب بود
بهنام –
با سلام و عرض ادب
فرض کنیدیک دوربین در یک اتاق نصب شده و ثابت است و در این اتاق یک شی متحرک مثلا یک شخص مدام در حال حرکت است(تاکیدا متحرک فقط یکی است).هدف من این است که میزان جابه جایی ، سرعت ، مدت زمانی که شخص حرکت کرده و مدت زمانی که شخص بدون حرکت و ثابت مانده ومکان هایی که حضور داشته را بدست بیاورم.آیا با این آموزش شما میتوان این پارامترها را بدست آورد.
در ضمن سرعت اجرای این برنامه چقدر است ؟ چون من هیچ نیازی به دیدن کل فیلم ندارم. برای من همین کافی است که فیلم را داده و این پارامترها را یدست آورم.
آیا تعداد متحرک ها بیشتر شود باز هم این روش کارایی دارد؟
با تشکر
ایران متلب –
سلام و تشکر از شما بابت سوالتون
الگوریتم هایی مثل فیلتر ذره یا شار نوری برای کاربردهای دنبال کردن یا tracking استفاده می شوند. این روشها به شما کمک می کنند که مکان و سرعت بعدی هدف را تخمین بزنید.
برای کاربرد شما می توان با روشهای پردازش تصویری به راحتی این کار را انجام داد. کافی در ابتدا پس زمینه را تخمین بزنید (background estimation) سپس از تصویر هر فریم کم کنید. می تونید شی متحرک را از بقیه جدا کنید.
برای محاسبه سرعت به راحتی می تونید از فریم های متوالی استفاده کنید. شما فرض می کنید اختلاف هر فریم یک ثانیه است یا اگر می دانید چند است آنرا در نظرمی گیرید. خوب dt را دارید.
برای dx کافی است موقعیت بعدی شی را از قبلی کم کنید. اگر تصویر دارای بزرگ نمایی است آنرا در این مقدار ضرب کنید تا مقدار دقیق جابجایی محاسبه شود.
سپس برای هر تغییری یک بردار سرعت محاسبه کنید. جاهایی که سرعت ثابت است، شی حرکتی نداشته است.
مکان هایی که حضور داشته هم به راحتی قابل یافتن است.
محمدرضا –
باسلام
ایا برای تشخیص اجسام ثابت در عکس و اینکه اگر این اجسام باهم overlap داشته باشند، میتوان از این روش استفاده نمود تا بتوان انها را از هم تفکیک نموده و تشخیص داد؟
سپاس
ایران متلب –
سلام
تا جایی که دانش من قد می دهد فیلتر ذره برای کارهای tracking یا ردیابی مورد استفاده قرار می گیرد. در ضمن مقاله ای را خواندم که در زمینه ردیابی شی بود وقتی قسمتی از شی با شی دیگر overlap داشته باشد اما در یک تصویر فکر نکنم بشه استفاده کرد. خودتون مقالات بخونید شاید کسی روشی براش ارائه داده باشد.
حسین شاهوردی –
با عرض سلام و وقت بخیر خدمت شما. من موضوع پروژه کارشناسیم این فیلتره میخواستم بدونم که این آموزش همه ی مباحث تیوری و هم برنامه نویسی رو شامل میشه و یکی دیگه اینکه این برنامه نویسی فقط به فیلم هایی که شما تو آموزش آوردین قابل اعماله یا به فیلم های دیگه هم میشه استفاده کرد
ایران متلب –
با سلام و تشکر از سوال شما
این آموزش ابتدا تئوری و سپس برنامه نویسی فیلتر ذره را شامل می شود. شما می توانید از این آموزش برای پردازش هر نوع فیلمی استفاده کنید.
لیلا –
LeilAA, [27.09.19 17:57]
سلام، آيا اين فايد اموزشي براي سيستم هاي غير خطي real time مثلا در سيستم عاي منترلي جهت state estimation هم قابل كاربرد هست؟
ایران متلب –
سلام
الگوریتم هایی مثل کالمن فیلتر و فیلتر ذره را باید الگوریتم مناسب ان را برای سیستم های غیرخطی استفاده کرد. در مورد کالمن فیلتر، نوع دیگری به نام Extended Kalman Filter برای سیستم های غیرخطی استفاده می شود ولی در مورد فیتلر ذزه چنین چیزی من تا الان ندیدم و برای هم سیستم های خطی و غیرخطی قابل استفاده است.
در این مقاله
http://user.it.uu.se/~thosc112/pubpdf/gopalunisw2009.pdfسیستم غیرخطی را یک مدل خطی تخمین زده و سپس فیلتر ذره را استفاده کرده است.